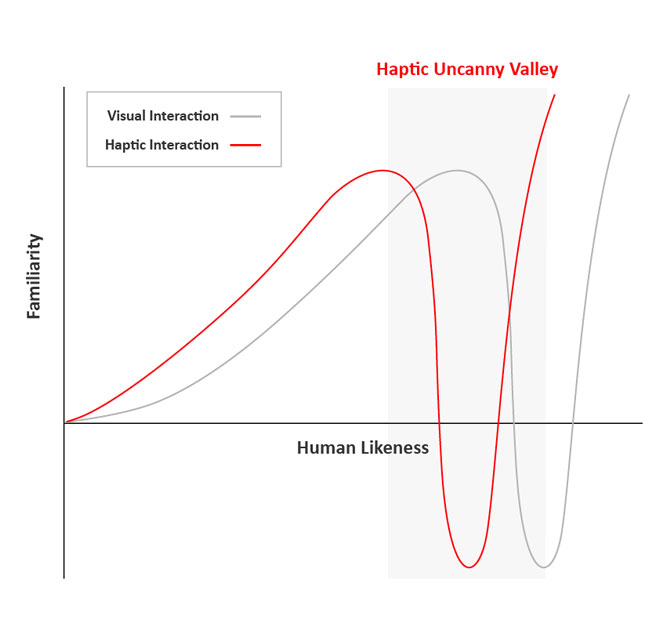
Haptic Uncanny Valley
The impact of a robot skin's tactile properties on user perception of a robot
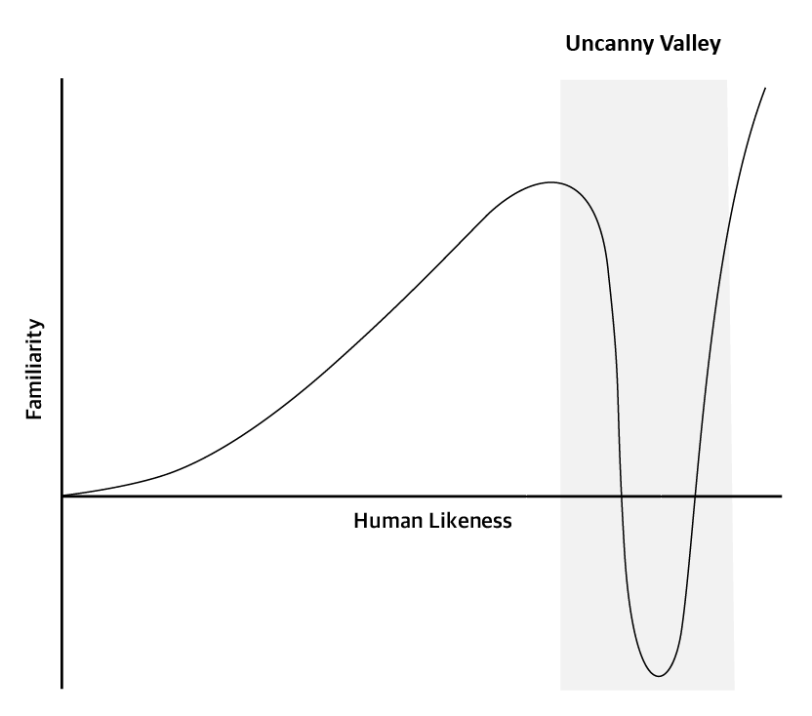
In the field of human-robot interaction, one approach to enhance people's acceptance of robots is to increase a robot's familiarity by using anthropomorphic(human-like) design. However, Mashiro Mori (1970) proposed a theory of "The Uncanny Valley" that as a robot increases human-likeness, there is a point where the degree of robot's human-likeness and people's expectation becomes out of balance. This imbalance makes negative emotional response toward a robot. In the study, I assess how the anthropomorphic(human-like) robot design affects people's acceptance toward a robot in the aspect of haptics.
Study Design
Two types of experiments were conducted with the same 48 participants: Experiment I, in the context of touching a robot's body, and Experiment II, in the context of viewing a robot's body texture. Participants experienced four robots with different skin textures. These skin textures evoked different levels of anthropomorphism (human-likeness). After interacting with four robots, participants answered questionnaires regarding each stimulus.
Stimuli
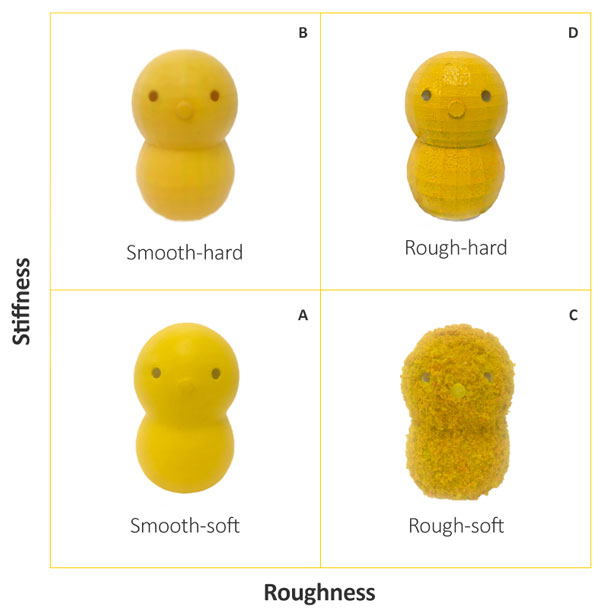
According to Shirado et al. (2006), smooth-roughness of surface texture and soft-hardness of material's structure are influential factors on people's perception of human-like skin texture. In addition, Georgious and Edwards (2014) insisted that roughness, which is related to the physical stiffness of a material, is one of the important perceptive cues for an object's identity.
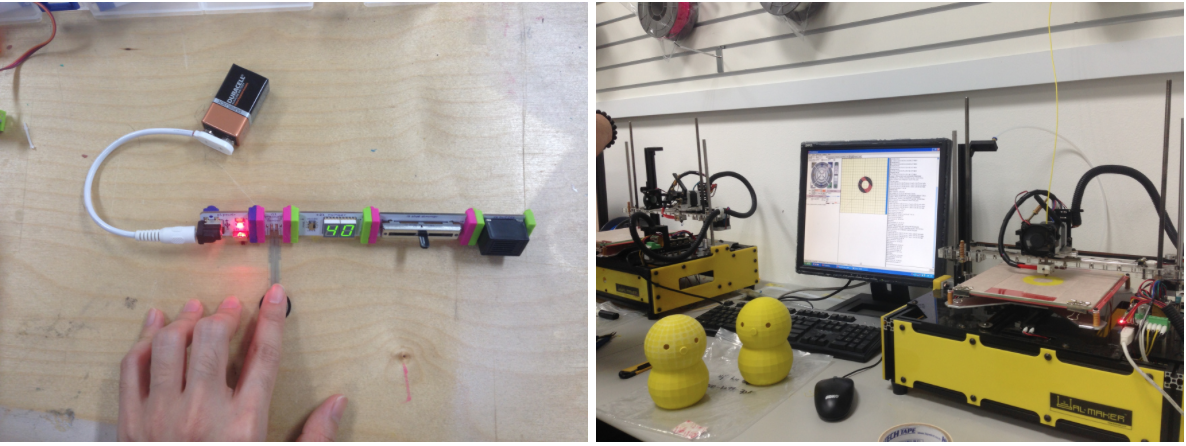
I created interactive prototypes using 3D printing and LittleBits with selected four types of robot surface. The robots made sound feedback when participants touched the robot's body. The robots were controlled by the Wizard of Oz technique.
Measure
Social presence, anthropomorphism and animacy of a robot were measured to see how participants perceive human-likeness of robots. In addition, likability and perceived safety were measured to see whether participants feel comfortable with them or not.
Results
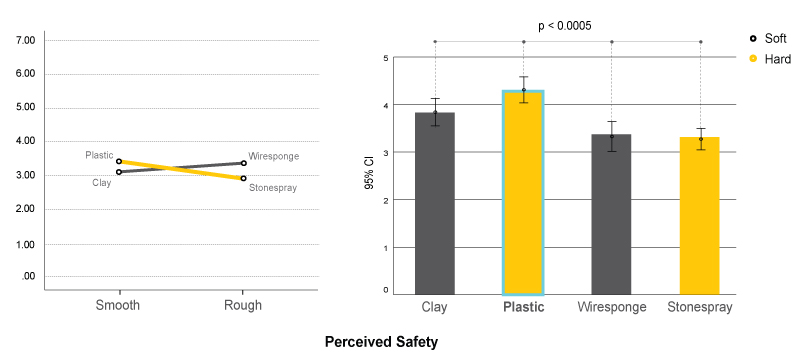
In experiment 1, participants had haptic interactions with the four robots through physical contact. The results showed that when physical roughness and stiffness of the robot skin surface were low, participants preceived higher social presence of a robot. Participants felt the highest level of social presence to the robot with smooth-soft texture (clay) and the lowest level of social presence to the robot with rough-hard texture (stonespray). However, they showed different tendency regarding the likeability and perceived safety of a robot. Participants preferred the robot with smooth-hard texture (plastic) the most, followed by smooth-soft texture (clay).
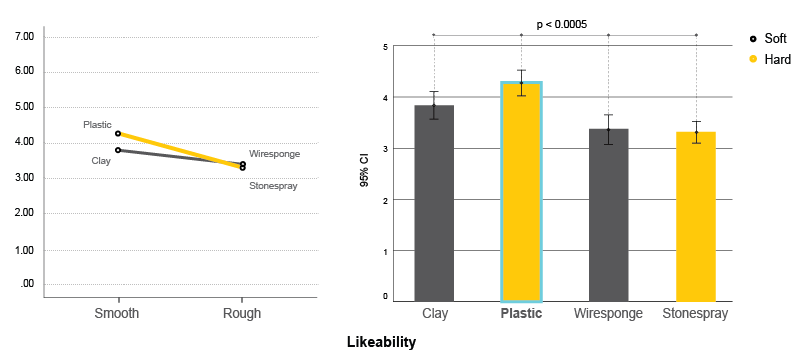
The results of experiment 1 indicates that surface texture could be used as the way of regulating tactile anthropomorphism of a robot. The graphs above shows that smoothness(physical stiffness from material structure) made dominant impact than the roughness(perceived roughness from surface shape pattern).
In Experiment II, participants had visual interaction without touch. The results showed that smooth textures were perceived to have higher social presence than rough textures. Additionally, soft textures were perceived to have higher social presence than hard textures.
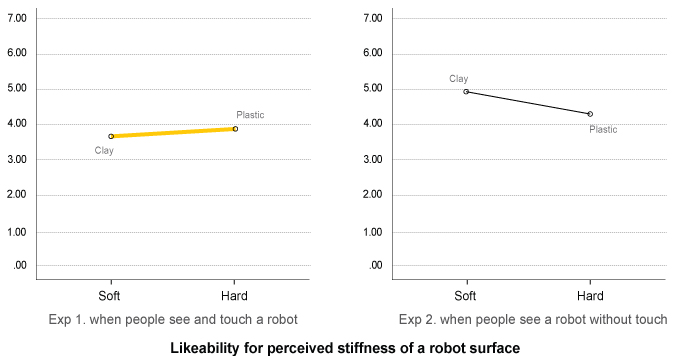
The results from Experiments I and II showed a significant difference between visual interaction and tactile interaction regarding likeability of a robot. Participants who had haptic interaction with a robot in Experiment I preferred hard surfaces over soft surfaces. On the contrary, participants who had visual interaction without touch in Experiment II preferred soft surfaces over hard surfaces.
Discussion
These different user preferences between haptic and visual interactions imply that a haptic uncanny valley based on multi-modal interaction with vision and touch would have a different trend from Mori's uncanny valley based on visual interaction.
Through Experiments I and II, I demonstrated an example of modulating the level of tactile anthropomorphism of a robot via tactile property design. The findings of this study can serve as an initial basis for effective social interaction between robotic products and users in haptic aspects. This understanding of how tactile properties influence user perception through different sensory modalities can inform the design of robots that are more acceptable and comfortable for human interaction across various contexts.