Robot in Your Intimate Space
Can people allow a social robot to enter their intimate space?
In our modern society, we can easily find social robots providing concierge, delivery, or security services in public spaces. These social robots are able to recognize people nearby and physically approach them using their mobility. According to Hall(1963), "intimate space" is the region surrounding a person within 1.5 feet which they regard as psychologically theirs. Most people value their personal space and actively protect it. We may feel discomfort, anger, or anxiety when our personal space is invaded.
Permitting someone to enter our personal space—or entering someone else's—serves as an indicator of how we perceive our relationship with that person. Intimate space is typically reserved for close friends, lovers, children, or close family members. This raises an important question: how do people perceive and react to a social robot entering their intimate space?

Ontological Perspectives on Social Robots: The Dual Nature of Robots
There are two conflicting ontological claims about social robots (Searle et al., 2001):
- The strong ontological claim: A robot could replace a human being with sufficiently advanced technology
- The weak ontological claim: A robot could never replace a human being and remains fundamentally an artifact
In the field of Human-Robot Interaction, Disalvo et al.(2002) argued that robots have both humanness and productness characteristics:
- If humanness dominates: People develop substantive emotional engagement toward robots and perceive them as social beings. In this case, people may want to maintain distance from robots to preserve their intimate space, and may feel discomfort when robots enter their intimate zones.
- If productness dominates: People do not develop substantive emotional engagement toward robots and perceive them as non-social beings. People may then allow robots to approach closely without experiencing discomfort when robots enter their intimate spaces.
Study Design
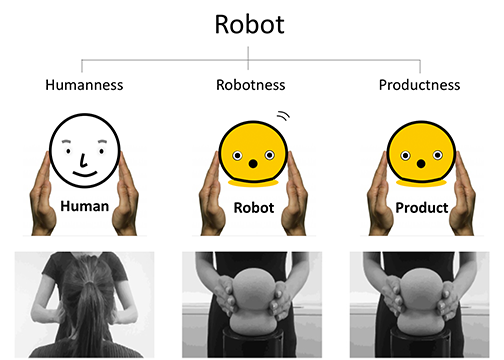
To see the robot’s dominant characteristic, I compared human-robot interaction with human-human / human-product interaction.
3 (communicator types: a human vs. a robot vs. a product) with-in participants experiment design was used (N=30).
Participants had physical contact with three communicators in random order. In each condition, participants were asked to put their hands on each communicator’s cheeks and lower their hands when they feel awkwardness or discomfort. After each condition, a questionnaire regarding the stimuli was administered.
Results
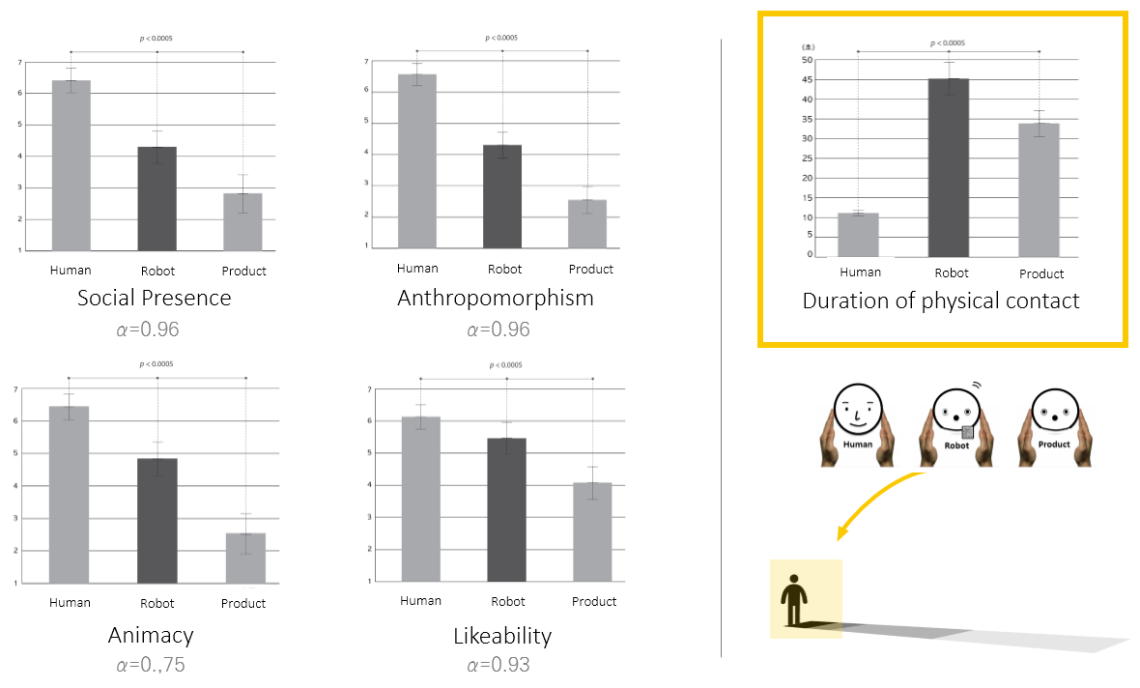
Perception Measures: People perceived the robot as intermediate between the human and the product across multiple dimensions: social presence, anthropomorphism, animacy, and likeability.
Duration of Physical Contact: Participants maintained the longest physical contact with the robot—longer than with either the human or the product.
According to post-experimental surveys and interviews, the findings reveal distinct patterns:
- Human interaction: Participants regarded the interaction as a stranger's invasion of their personal space, leading to shorter contact duration.
- Product interaction: Participants felt the least motivation to continue the interaction because they regarded the product as a non-social, non-living being with no interaction capability.
- Robot interaction: Participants felt comfortable continuing the physical contact and believed they were engaged in two-way interaction. They perceived that the robot had a lower level of social presence than a human, but still regarded it as a social being capable of recognizing them.
Discussion
The results show that the robot's humanness enables social interaction with people, while its productness reduces people's discomfort within intimate space. Since participants perceived the robot's productness as more dominant than its humanness, people were able to maintain longer physical contact with the robot than with a real person.
Implications
These findings suggest that robots with product-like forms and appearances could be highly effective for applications requiring close-distance physical interactions. When a robot's design appropriately reflects its productness—through mechanical or functional aesthetics rather than human-like features—users can comfortably accept physical assistance within their intimate space without experiencing the discomfort associated with stranger intrusion.
However, this implies that androids with highly anthropomorphic, human-like appearances may not be suitable for such applications. An android design creates an imbalanced anthropomorphic design where the robot's human appearance triggers stronger social expectations and personal space boundaries, similar to interactions with strangers. This heightened humanness would likely increase user discomfort during close physical contact, counteracting the benefits of the robot's productness.
Therefore, for robots intended to provide physical services in intimate distances—such as healthcare assistance, personal care, or physical support tasks—designers should prioritize product-oriented aesthetics that clearly communicate the robot's functional, artifact nature rather than pursuing human-like realism.
Publications
Baek, Chaehyun, et al. "Can you touch me?: the impact of physical contact on emotional engagement with a robot."Proceedings of the second international conference on Human-agent interaction. ACM, 2014.
http://dl.acm.org/citation.cfm?id=2658909
Baek, Chaehyun, et al. "Can I Get Close to You?: the impact of communicator types on people's acceptance toward a communicator." Archives of Design Research Vol.28 No.2, 63-72
http://www.aodr.org/_common/do.php?a=current&b=91&bidx=332&aidx=4149